Mouvements et interactions
0- Utilisation de pymecavideo
Pymecavideo est le logiciel que nous utiliserons en mécanique pour étudier les mouvements.Il est relativement simple d'utilisation, voici un rapide tutoriel pour l'utiliser :
I- Mouvement et référentiel
1) Introduction
Incident survenu dans le TGV Paris-Lyon
L'inspecteur Watson enquête sur tous les incidents, même les plus minimes. Voici un extrait du rapport d'une de ses enquêtes.
Les faits : Nous sommes le 1er avril 2021. Alors que Chloé dormait tranquillement, un individu, que l’on prénommera X, lui a collé un poisson d’avril sur le front.
Les témoignages recueillis :
- Alice - "La victime était immobile"
- Olivier - "X s’éloignait vers le nord"
- Franck - "La victime et X se déplaçaient très rapidement vers le sud"
- La vache - "Meuh"
- Cynthia -"Je n'ai rien vu car j'étais en train de regarder les arbres qui reculaient"
Aidez l’inspecteur Watson à reconstituer la scène de l’incident.
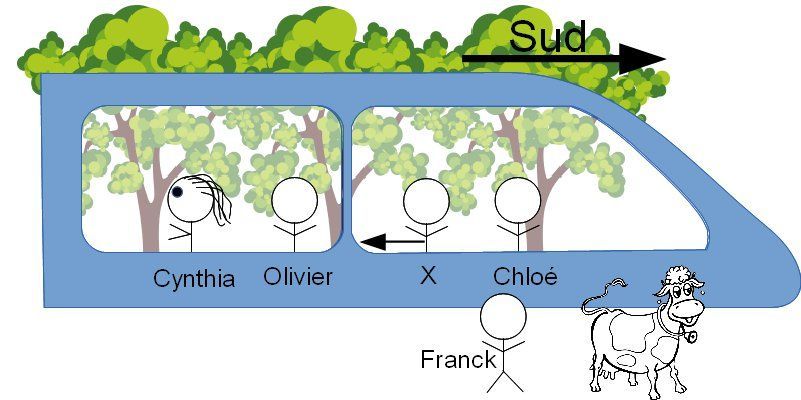
On voit qu'une même scène peut être décrite de façon très différente en fonction du lieu où l'on se trouve. Il est donc nécessaire avant toute étude de mouvement de préciser par rapport à quel référence on l'étudie.
2) Le référentiel
C'est ce par rapport à quoi l'on va étudier un mouvement. Il n'y a pas de référentiel absolu, mais on peut en citer 3 qui sont souvent utilisés :
- Le référentiel terrestre rattaché au sol (salle de classe, laboratoire)
Il est utilisé pour les mouvements terrestres (vélo, voiture) et aériens (avion, oiseau) - Le référentiel géocentrique, positionné au centre de la Terre, mais ne tournant pas avec elle. Ainsi, le référentiel terrestre tourne autour du référentiel géocentrique en 24h.
Il est utilisé pour le mouvement des satellites ou de la Lune. - Le référentiel héliocentrique, positionné au centre du Soleil, mais ne tournant pas avec lui.Le référentiel géocentrique tourne autour de lui en 365j.
Il est utilisé dans l'étude du mouvement des planètes, comètes, astéroïdes...
- le référentiel terrestre
Dans ce référentiel, l'élève est immobile : v = 0 km/h - le référentiel géocentrique
L'élève fait le tour du référentiel en 24h.
Il parcourt pendant ce temps le périmètre terrestre, soit à peu près 40 000 km.
Sa vitesse est donc : - le référentiel héliocentrique
L'élève fait le tour du référentiel en 365j, soit
Pendant ce temps il parcourt l'orbite de la Terre autour du Soleil. La distance Terre-Soleil = 150 000 000 km.
L'orbite a donc un périmètre de
Sa vitesse est donc :
3) Le repère
Pour décrire correctement le mouvement d'un objet dans un référentiel choisi, il faut y choisir un repère orthonormé.
Ce repère n'est en revanche pas forcément orienté selon la verticale et l'horizontale. Il peut être plus judicieux de l'orienter en fonction du mouvement étudié pour simplifier les calculs.
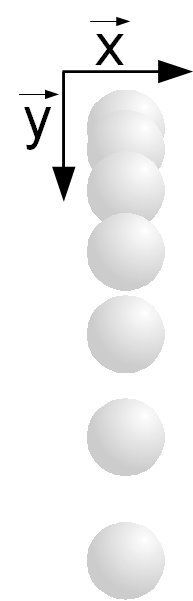 Etude de la chute d'une balle. |
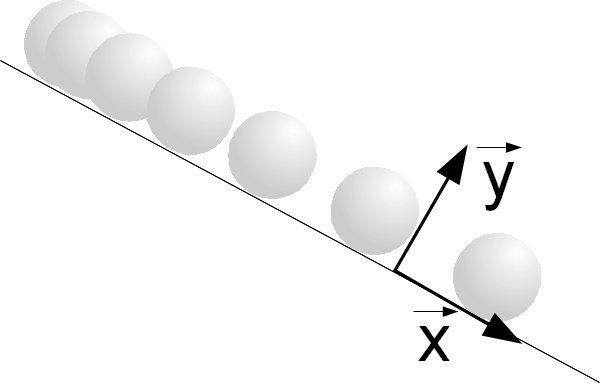 Etude d'une balle qui roule sur un plan incliné. |
4) La trajectoire
Il est n'est toujours possible de parler de la trajectoire d'un objet entier, on parle donc de la trajectoire d'un point précis appartenant à l'objet.
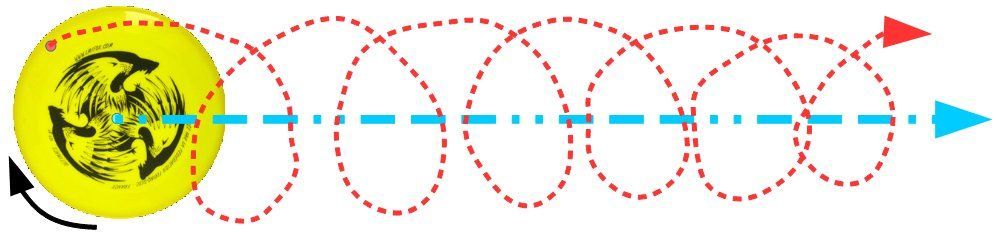
Trajectoire de deux points d'un frisbee lancé
On distingue trois types de trajectoires :
|
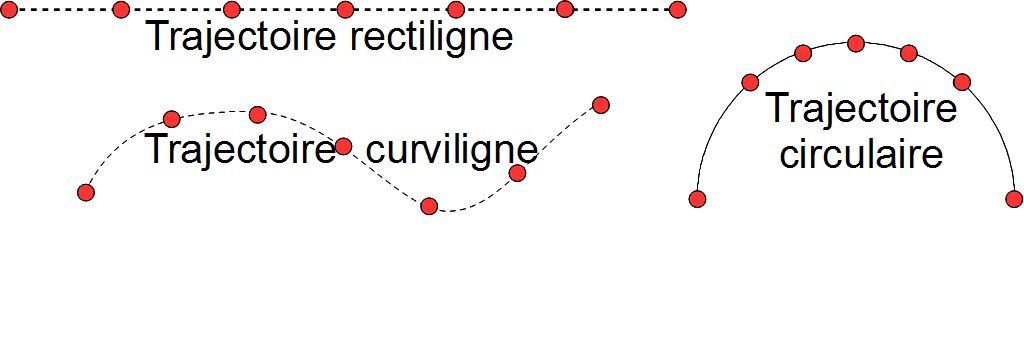
|
5) La vitesse

|
La vitesse d'un point correspond à la distance que ce point a parcouru dans un intervalle de temps donné :
Dans un exemple comme le cas ci-contre, il faut utiliser la relation de Pythagore pour calculer la vitesse : |
Etude informatique du mouvement
1) Logiciels de chronophotographie
La chronophotographie consiste à prendre des images à intervalles réguliers afin de pouvoir étudier un mouvement. Cette méthode a été inventée en 1878 (si vous voulez en savoir plus : vous pouvez aller faire un tour sur Wikipédia).Il existe maintenant des applications permettant de le faire simplement à l'aide de votre téléphone comme Motion Shot©
(
 sur Android ou
sur Android ou  sur iOS).
sur iOS).Sur ordinateur, on utilise en classe l'Atelier Scientifique de Jeulin©. Celui-ci étant payant (et obsolète), il vous est possible d'utilise le programme Pymecavideo, que vous pouvez télécharger en cliquant sur l'icône ci dessous :
Pymecavideo 7.2.1.1
2) Etude du mouvement à l'aide de pymecavideo
3) Vitesse et langage de programmation
Le calcul présenté précedemment est rapidement fastidieux si on le fait à la main. Un langage de programmation va permettre de faire réaliser ces opérations par l'ordinateur.
Dans le TP n°13, on a pointé la trajectoire d'une balle lancée "en cloche", on peut récupérer les coordonnées des positions successives et les intégrer dans le programme :
#pas de temps (en secondes)
delta_t=0.04#a_indiquer
x=[-0.954, -0.874, -0.795, -0.716, -0.636, -0.557, -0.477, -0.398, -0.319, -0.239, -0.16, -0.081, -0.001, 0.078, 0.157, 0.237, 0.316, 0.395, 0.475, 0.554, 0.634, 0.713, 0.792, 0.872, 0.951, 1.03, 1.11, 1.189, 1.268, 1.348, 1.427]
y=[0.06, 0.24, 0.405, 0.555, 0.689, 0.808, 0.911, 0.999, 1.072, 1.129, 1.171, 1.198, 1.209, 1.205, 1.185, 1.15, 1.1, 1.035, 0.954, 0.858, 0.746, 0.619, 0.477, 0.319, 0.146, -0.043, -0.246, -0.465, -0.7, -0.95, -1.215]
#coordonnées de l'objet #pas de temps (en secondes)
delta_t=0.04#a_indiquer
x=[-0.954, -0.874, -0.795, -0.716, -0.636, -0.557, -0.477, -0.398, -0.319, -0.239, -0.16, -0.081, -0.001, 0.078, 0.157, 0.237, 0.316, 0.395, 0.475, 0.554, 0.634, 0.713, 0.792, 0.872, 0.951, 1.03, 1.11, 1.189, 1.268, 1.348, 1.427]
y=[0.06, 0.24, 0.405, 0.555, 0.689, 0.808, 0.911, 0.999, 1.072, 1.129, 1.171, 1.198, 1.209, 1.205, 1.185, 1.15, 1.1, 1.035, 0.954, 0.858, 0.746, 0.619, 0.477, 0.319, 0.146, -0.043, -0.246, -0.465, -0.7, -0.95, -1.215]
### Tracé des vecteurs normalisés
plt.rcParams['axes.formatter.use_locale'] = True
plt.figure(1, figsize=(5, 5))
plt.plot(x,y,"r.")
plt.legend(loc='upper right')
plt.xlabel("x (m)")
plt.ylabel("y (m)")
plt.title("Trajectoire de l'objet")
plt.show()
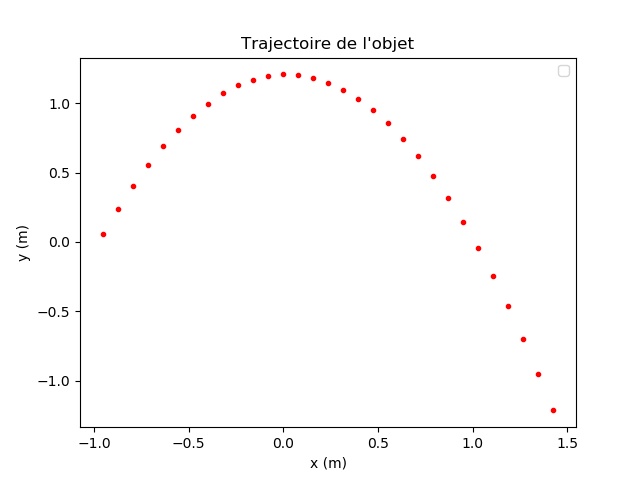
Les points rouges représentent les positions successives de la balle
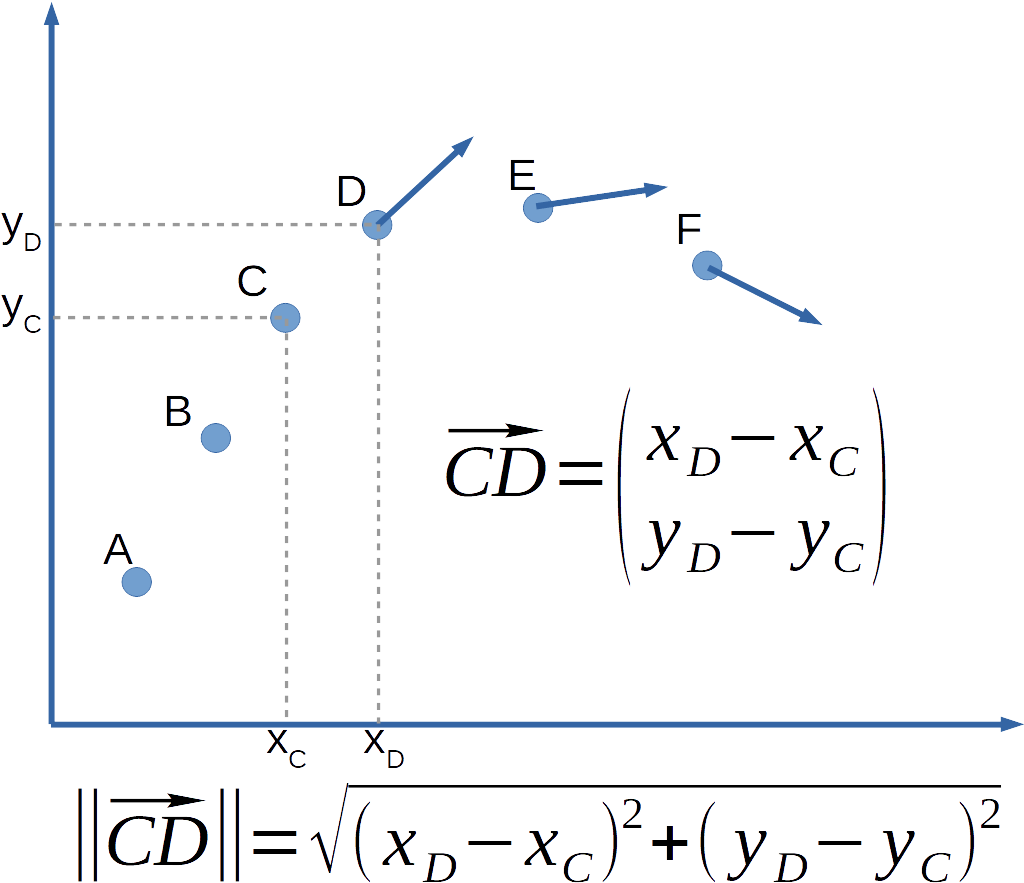
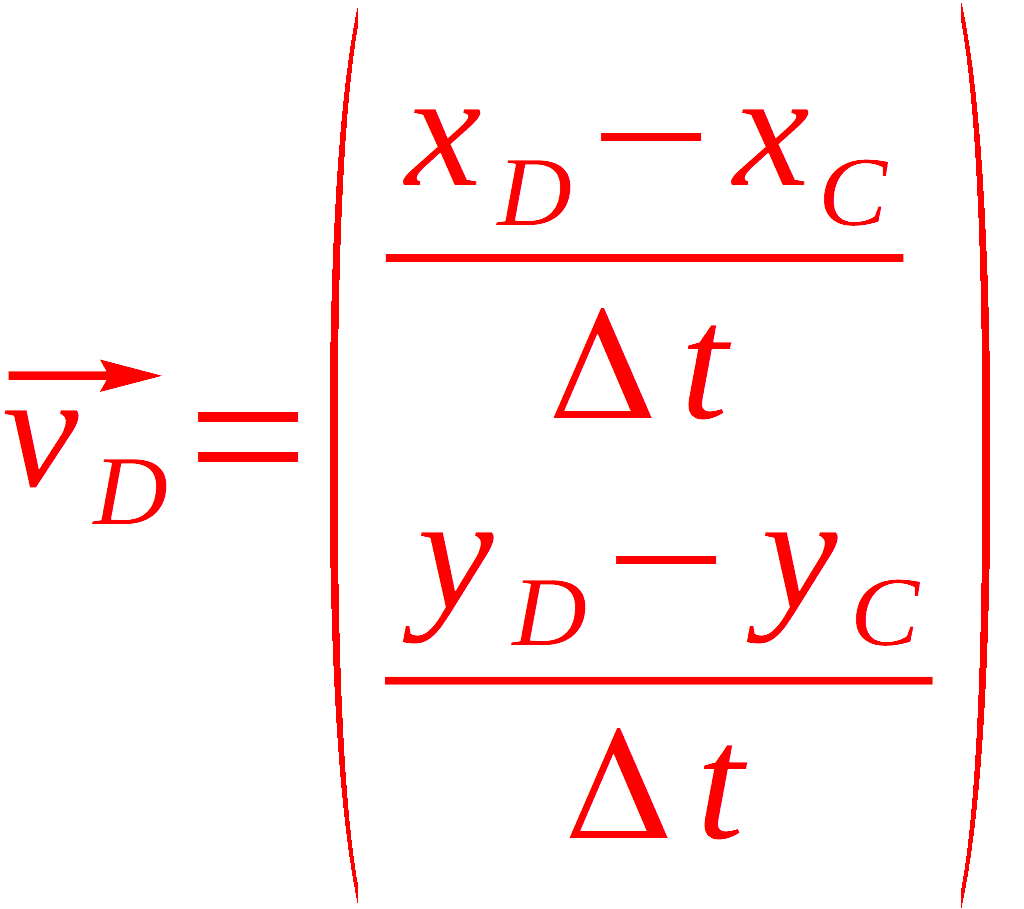
Représentation de la vitesse par des vecteurs
La vitesse en un point donné correspond au rapport entre le vecteur formé par ce point et le point précédent et l'écart de temps séparant les 2 positions.
Cela s'écrit :
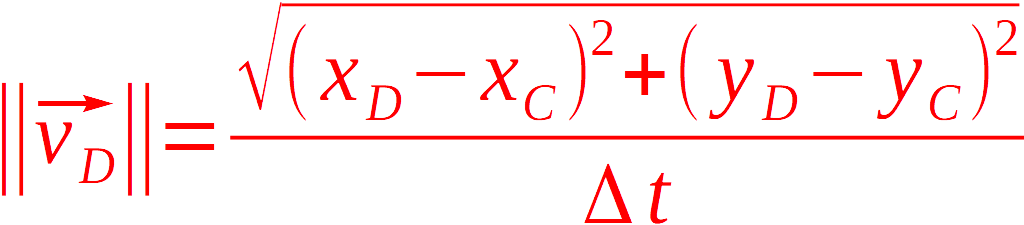
Valeur de la vitesse au point D
Valeur de la vitesse au point D
4) Variation de vitesse
Télécharger le fichier
La vidéo ci-dessous explique les démarches :
II- Les forces
1) Introduction
- Télécharger l'activité : Cliquer ici
- L'animation simulameca est disponible sur le site de Tristan Rondepierre : Cliquer ici pour y accéder
- Les fichiers forces.swf (cliquer pour télécharger) (auteur : Adrien WILLM) et TPvirtuel_poids_masse.swf (cliquer pour télécharger) (Auteur : Stéphane Bonnaud) sont des fichiers au format Acrobat flash. Comme ce forma a été abandonné par Adobe, il est nécessaire si vous n'arrivez pas à l'ouvrir de récupérer ce logiciel : Adobe Flash Player 10
2) Présentation
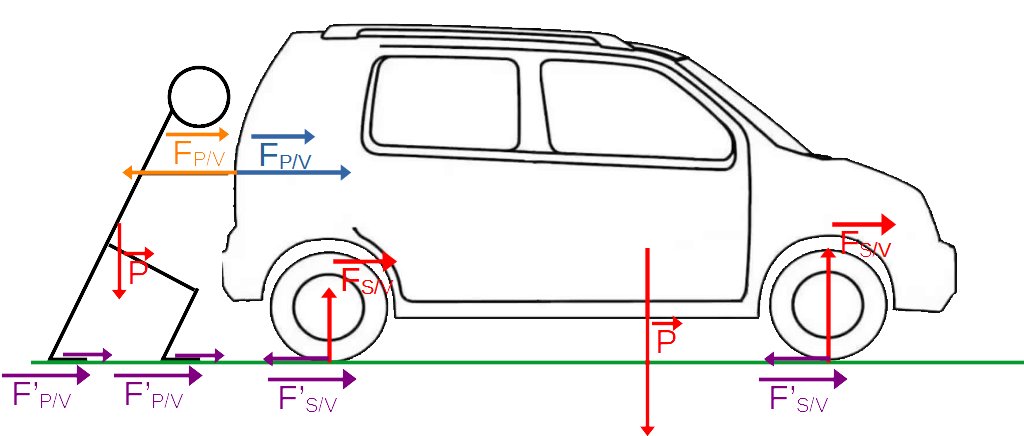
Pierre pousse sa voiture qui ne veut pas démarrer. En se mettant derrière, il exerce une action mécanique, que l'on représente ainsi :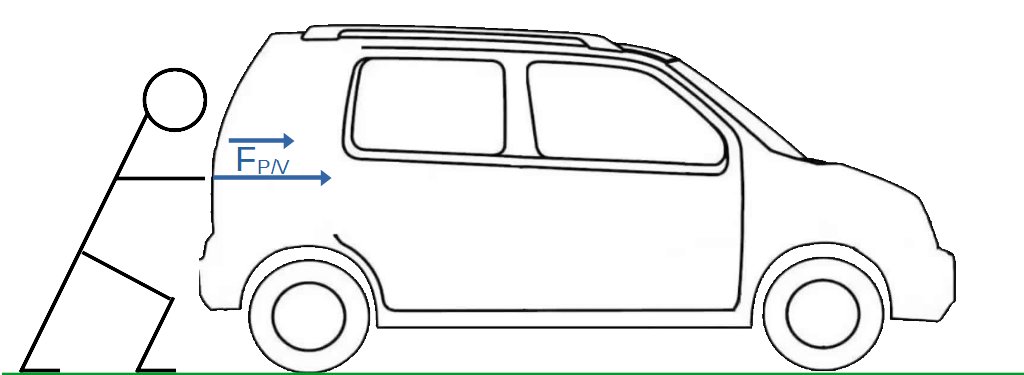
- l'origine est le point d'application de la force,
- La direction et le sens sont celles de la force
- La longueur est proportionnelle à l'intensité de la force.
L'unité du Système International pour exprimer une force est le newton (N)
2) Principe d'action-réaction
Ce que l'on appelle aussi la 3eme loi de Newton et que l'on peut trouver contre-intuitive s'énonce ainsi :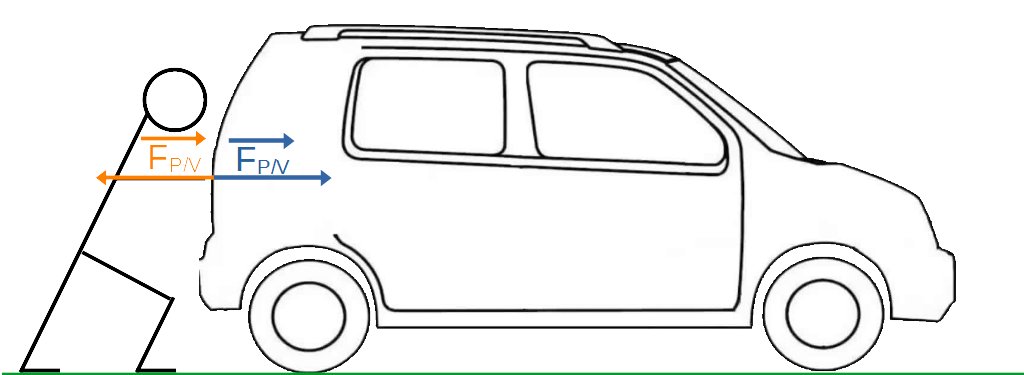
3) Principe d'inertie
Ce que l'on appelle aussi la 1ere loi de Newton et que l'on peut trouver tout aussi contre-intuitive que la précédente s'énonce ainsi :4) Application à Pierre et sa voiture
Si l'on revient à l'exemple précédent, on pourrait se demander comment il est possible d'expliquer le mouvement à partir des forces, puisque quel que soit l'effet (la voiture avance, recule ou est immobile) on a toujours .En réalité, si ces forces se compensent et que la voiture se met en mouvement, on doit en conclure que ce qui explique le mouvement n'est pas représenté ! On est donc poussé à rechercher ces forces :
- L'action du poids
P → - La réaction du sol
- et surtout : les frottements du sol
3) Lister les forces s'exerçant sur un objet
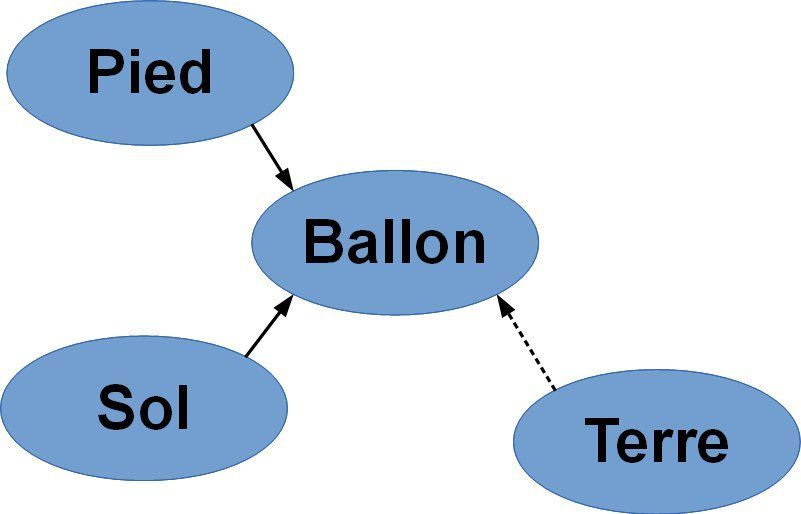 |
Pour ne pas oublier une force lorsque l'on énumère celles qui s'exercent sur un objet, on peut utiliser un diagramme objet-interaction (ou DOI).
|

4) Relation entre la masse et le poids
Le poids d'un objet est la force d'attraction qu'exerce la masse de la Terre sur cet objet.
Puisque le poids est une force, il ne s'exprime pas en grammes ou en kilogrammes (ça, c'est la masse) mais en newtons (N).
La masse est une grandeur qui est propre à l'objet. Elle ne dépend que de l'objet et pas du lieu où il se trouve.
Le poids est une grandeur qui dépend de la masse de l'objet, mais également du lieu où il se trouve.
Pour trouver la relation entre la masse et le poids, vous pouvez faire ce "TP virtuel" proposé dans le TP17 et réalisé par Stéphane Bonnaud (le site sciencesgrandsud mentionné ne semble plus exister)
5) Des forces particulières
- La gravité
Son point d'application est le centre de gravité de l'objet, sa direction est la verticale du lieu et son sens vers le centre de la Terre.
Son intensité, qu'on appelle le poids vaut avec g=9.8N.kg-1 sur Terre. - La force électromagnétique
Il est difficile d'étudier cette force en seconde car sa direction, son sens, sont intensité et son point d'application sont variables. - La poussée d'Archimède
Contrairement aux deux précédentes forces, la poussée d'Archimède est une force de contact. Elle est exercée en tout point de la surface de l'objet qui est immergé dans le fluide qui l'exerce. Plutôt que de représenter une infinité de points à la surface de l'objet, on ne représente qu'une seule force, au centre géométrique de la partie immergée de l'objet.
La poussée d'Archimède s'oppose à l'attraction, sa direction est donc verticale et son orientation vers le haut. Son intensité est égale au poids du volume d'eau déplacé par l'objet.
Applications :
Jean-Pierre a une masse de 90 kg et un volume corporel de 92L.
1) Calculer son poids
Jean-Pierre plonge dans sa piscine et s'immerge complètement, immobile.
2) Calculer la poussée d'Archimède qu'exerce l'eau sur Jean-Pierre.
3) Conclure
Données :
g = 9.8N.kg-1; ρeau=1000kg.m-3
Corrigé :
1) Le poids de Jean-Pierre vaut :
2) Jean-Pierre a un volume corporel de 92L, il déplace donc ce même volume d'eau.
La masse d'eau vaut donc
Le poids de ce volume d'eau vaut
3) Jean-Pierre n'est soumis qu'à son propre poids (882N) et la poussée d'Archimède (901.6N). Il va donc remonter à la surface puisque la poussée d'Archimède est plus forte que son poids.